sommaire
préambule
Dans l’article intitulé « La technique de la traction en street lifting », nous avions déjà mis en évidence l’importance déterminante de la saisie des mains sur la barre fixe dans la performance sur la traction en street lifting. Toutefois, cette première analyse était majoritairement centrée sur la variante en pronation et reposait sur un niveau de compréhension alors limité par les données disponibles à cette période.
Depuis, l’évolution du street lifting, combinée à l’accumulation de retours empiriques issus d’athlètes de haut niveau à l’échelle internationale, ainsi que l’apport de nouvelles données issues de la littérature scientifique en biomécanique de la préhension, permet aujourd’hui d’approfondir significativement ce facteur clé de la performance.
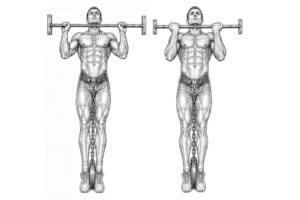
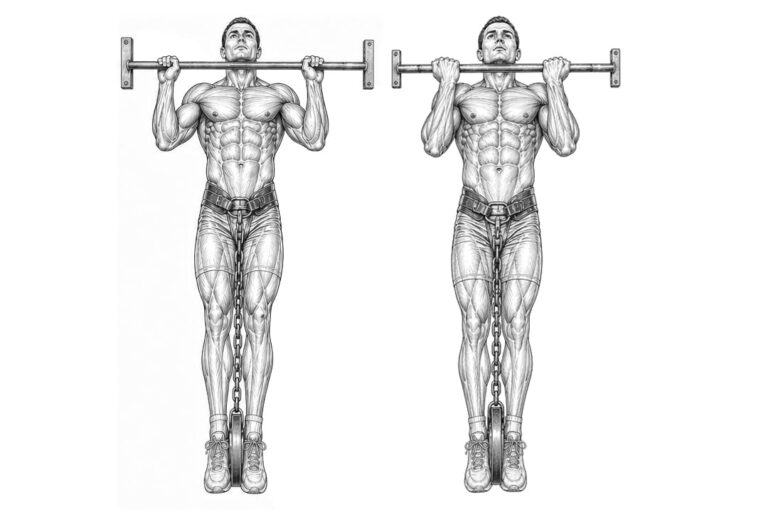
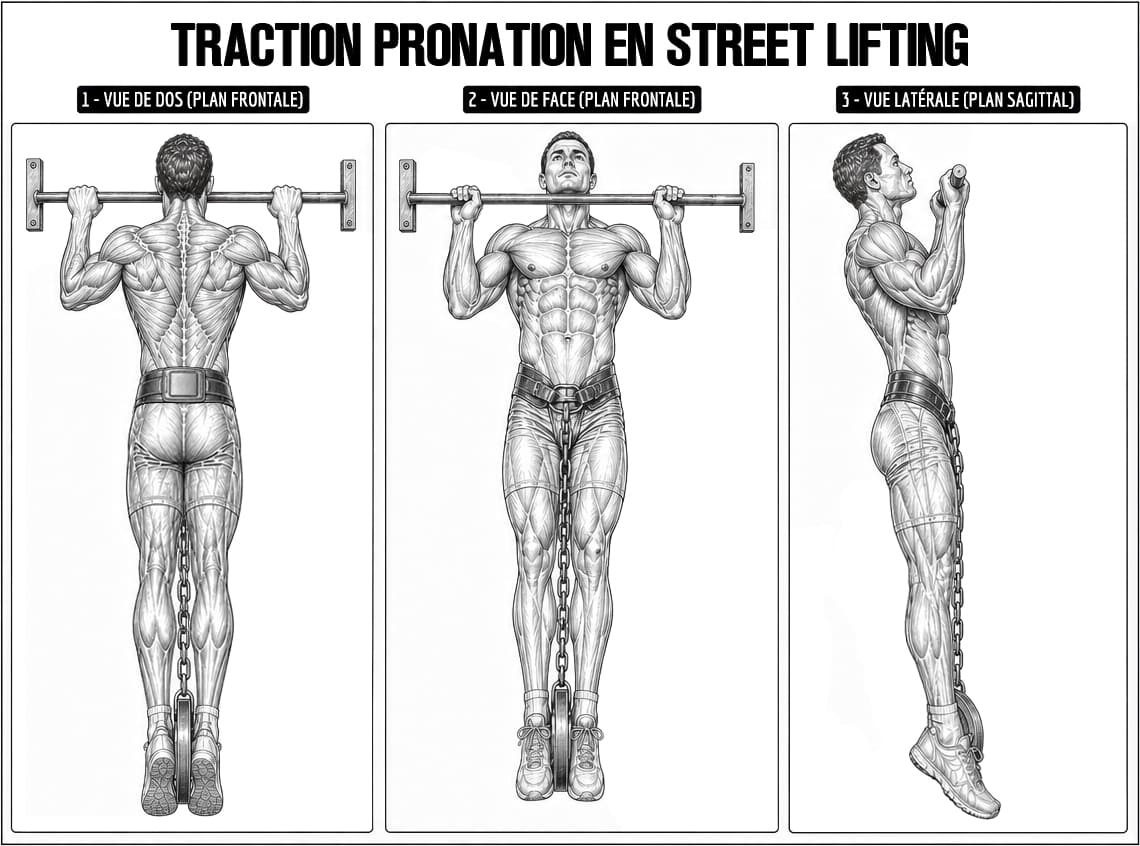
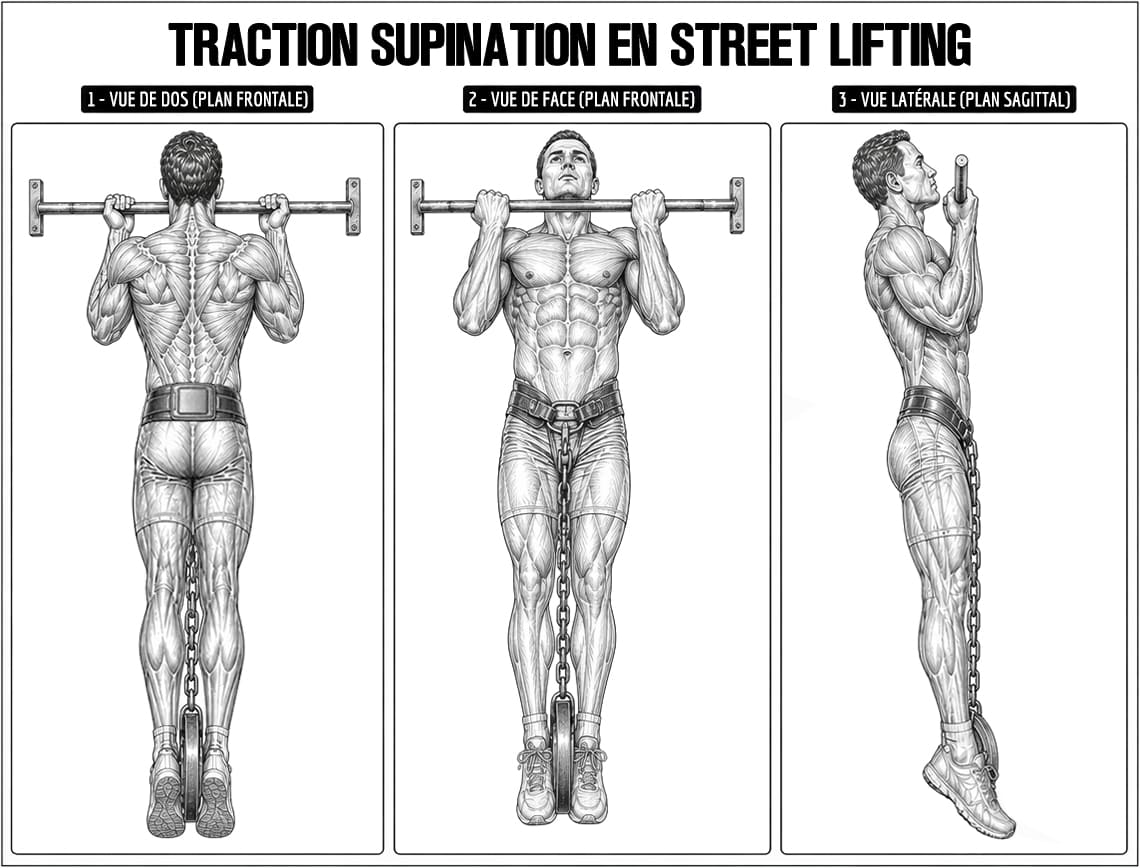
Ainsi, cet article propose une analyse approfondie et actualisée du placement des mains, des doigts et du poignet lors de la traction en street lifting, en prise pronation (pull-up) et supination (chin-up). L’objectif est de mettre en corrélation les données scientifiques actuelles avec les observations de terrain, afin de dégager des principes biomécaniques robustes permettant d’optimiser à la fois la performance sportive et la préservation de l’intégrité articulaire.
Enfin, il convient de rappeler que dans un domaine en constante évolution comme le street lifting, les connaissances actuelles doivent être envisagées comme évolutives. Les conclusions proposées dans cet article s’inscrivent donc dans une démarche scientifique rigoureuse, tout en restant ouvertes aux futures avancées en biomécanique du sport et en optimisation de la performance sur la traction en street lifting.
Introduction du placement des mains et du poignet lors de la traction en street lifting
L’analyse du placement des mains lors de la traction en street lifting, qu’elle soit réalisée en prise pronation (pull-up) ou supination (chin-up), met en évidence une interaction complexe entre les propriétés biomécaniques locales de la main et les contraintes globales du mouvement de tirage. Si la littérature scientifique ne traite que marginalement de la traction à la barre fixe, elle fournit néanmoins un corpus solide de données relatives à la force de préhension, à la position du poignet et à la coordination des muscles de l’avant-bras, permettant d’établir des corrélations pertinentes avec la pratique du street lifting.
Le placement des mains sur la barre constitue un déterminant biomécanique majeur dans l’exécution de la traction en street lifting.
Bien que souvent considéré comme secondaire, il influence directement :
- la production de force,
- la transmission de force dans la chaîne cinétique,
- la cinématique du membre supérieur,
- et le risque de blessure.
Une saisie optimale repose sur trois paramètres fondamentaux :
- le placement des mains,
- le placement des doigts (et du pouce),
- l’inclinaison des poignets.
Les données actuelles permettent de proposer un modèle cohérent, ainsi, la configuration optimale du grip en traction dépend d’un compromis entre :
- les propriétés biomécaniques locales (force de préhension),
- les contraintes globales du mouvement (transmission de force, trajectoire, coordination).
Le positionnement des poignets lors de la traction en street lifting
Le positionnement du poignet constitue un déterminant biomécanique central dans la production et la transmission de force lors de la traction en street lifting, quelle soi prise pronation (pull-up) comme supination (chin-up). Bien que ce facteur soit encore largement sous-estimé dans la pratique, il fait l’objet de nombreuses investigations en biomécanique de la préhension, offrant un cadre scientifique particulièrement robuste pour son analyse.
position optimale du poignet et force de préhension
Les travaux de référence en biomécanique de la main, démontrent que la production maximale de force de préhension est obtenue avec :
- une extension modérée du poignet (~15 à 35°),
- une légère déviation ulnaire (~5 à 10°). [1] [2]
Ces résultats ont été confirmés par d’autres travaux expérimentaux, qui mettent en évidence que la force maximale de grip est observée entre 15° et 30° d’extension, tandis que la flexion du poignet entraîne une diminution significative de la force. [3] [4] [5] [6]
relation longueur–tension et production de force
L’explication biomécanique principale de l’influence du positionnement du poignet sur la force de préhension repose sur un principe fondamental de la physiologie musculaire : la relation longueur–tension (Length–Tension Relationship).
Ce principe, largement décrit dans la littérature en biomécanique et en physiologie musculaire, stipule que la capacité d’un muscle à produire de la force dépend directement de sa longueur au moment de la contraction. Autrement dit, un muscle ne possède pas une capacité de production de force constante : celle-ci varie en fonction de son degré d’étirement ou de raccourcissement.
Sur le plan microscopique, ce phénomène est directement lié à l’organisation des sarcomères, unités contractiles élémentaires du muscle. La production de force résulte de l’interaction entre les filaments d’actine et de myosine. Lorsque le muscle est excessivement raccourci, le chevauchement entre ces filaments devient trop important, limitant la formation de ponts actine–myosine. À l’inverse, lorsqu’il est excessivement étiré, le chevauchement devient insuffisant et le nombre de ponts pouvant être formés diminue également.
Ainsi, la force maximale est obtenue pour une longueur musculaire intermédiaire, correspondant à une organisation optimale des sarcomères et donc à un potentiel maximal de développement de tension active.
Cette relation, démontrée expérimentalement depuis les travaux fondateurs de Gordon, Huxley et Julian, constitue aujourd’hui l’un des principes centraux de la physiologie musculaire moderne et explique de nombreuses adaptations observées en biomécanique du mouvement. [7]
Un muscle n’est jamais intrinsèquement fort ou faible : il est plus ou moins performant selon la longueur à laquelle il est sollicité.
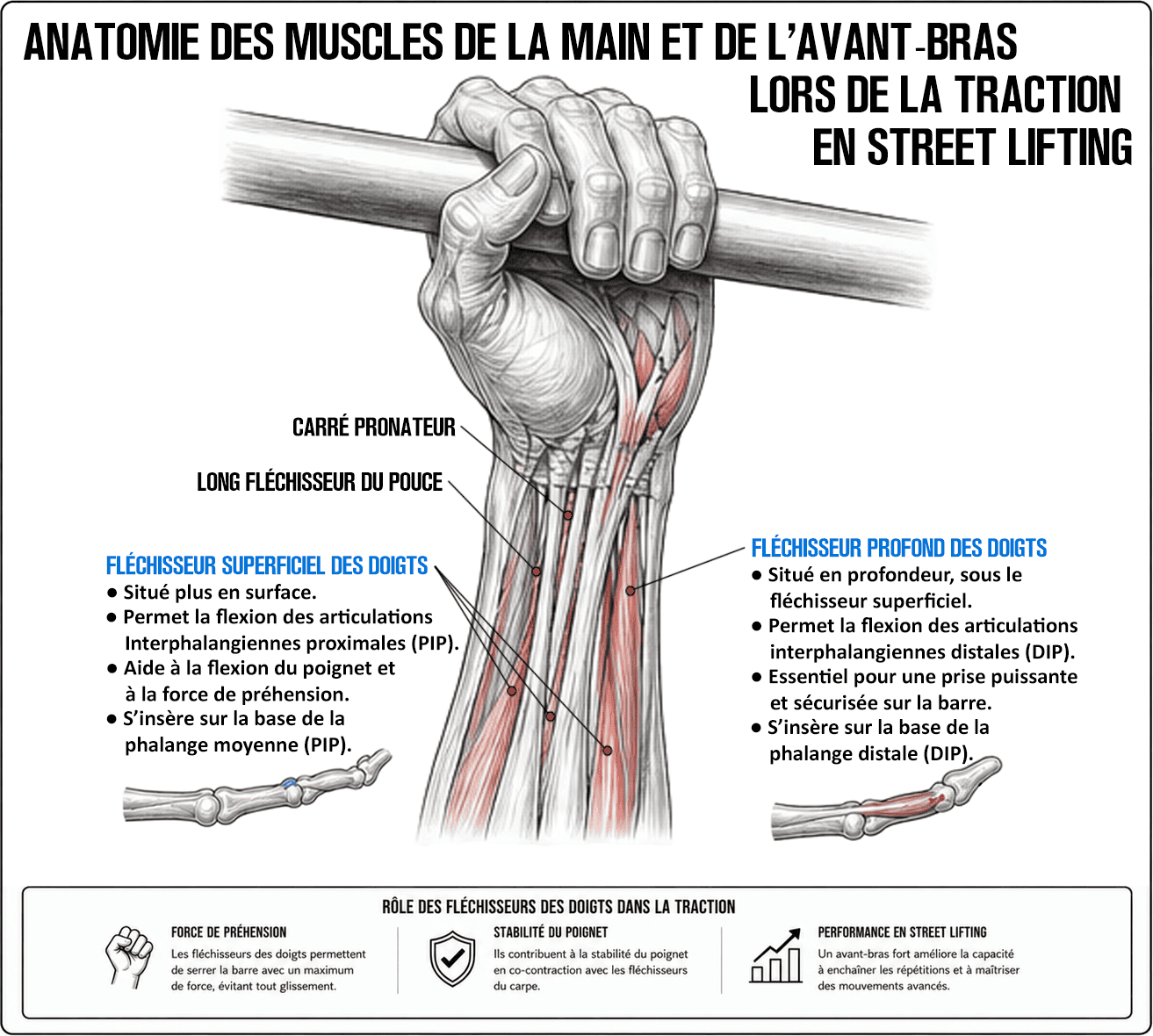
Dans le cas de la force de préhension, ce principe concerne principalement les fléchisseurs extrinsèques des doigts, en particulier les fléchisseurs profonds profonds des doigts (Flexor Digitorum Profundus (FDP)) et les fléchisseurs superficiels des doigts (Flexor Digitorum Superficialis (FDS)).
Ces muscles présentent une particularité anatomique essentielle : ils sont bi-articulaires. Leur trajet débute au niveau de l’avant-bras, franchit l’articulation du poignet puis se termine sur les phalanges des doigts. Par conséquent, leur longueur fonctionnelle dépend simultanément de la position des doigts et de celle du poignet.
Lorsque le poignet est placé en flexion, ces muscles se retrouvent raccourcis avant même le début de la contraction volontaire. Ils fonctionnent alors dans une zone défavorable de leur courbe longueur–tension, ce qui réduit leur capacité à développer une force importante. Ce phénomène est accentué par une insuffisance active, situation dans laquelle un muscle bi-articulaire raccourci sur l’ensemble de ses articulations ne peut plus produire sa tension maximale. [8]
À l’inverse, lorsque le poignet adopte une légère extension, les fléchisseurs des doigts sont replacés dans une longueur plus favorable. Les sarcomères retrouvent une organisation optimale, permettant une interaction plus efficace entre l’actine et la myosine, une augmentation du recrutement moteur et une production de force significativement supérieure. [9] [10]
Les travaux de O’Driscoll et collaborateurs ainsi que ceux de Li, Mogk et Keir démontrent ainsi que la force maximale de préhension est obtenue lorsque le poignet est maintenu en légère extension (environ 15 à 35°) associée à une faible déviation ulnaire (5 à 10°). Cette configuration optimise simultanément la longueur fonctionnelle des fléchisseurs des doigts, leur bras de levier musculaire et l’organisation mécanique globale de la main. [11]
À l’inverse, une flexion du poignet entraîne une diminution importante de la force de préhension, dont l’amplitude varie selon les protocoles expérimentaux, avec des pertes rapportées pouvant atteindre 25 à 60 % par rapport à la position optimale.
Cependant, la relation longueur–tension ne constitue qu’une partie de l’équation biomécanique. Si elle explique parfaitement les performances observées lors des tests isométriques de force de préhension, elle ne suffit pas, à elle seule, à prédire la stratégie optimale dans un mouvement complexe tel que la traction lestée. En effet, dans ce contexte dynamique, la main n’a pas uniquement pour fonction de produire de la force, elle doit avant tout transmettre efficacement les forces générées par l’ensemble de la chaîne cinétique. [12] [13] [14]
Cette distinction entre production locale de force et transmission globale des contraintes mécaniques constitue l’un des concepts centraux de la biomécanique moderne et explique pourquoi certaines configurations du poignet, pourtant défavorables au regard de la relation longueur–tension, peuvent néanmoins améliorer la performance globale en traction.
La relation longueur–tension optimise la capacité du muscle à produire de la force. La performance en traction dépend ensuite de la capacité du système musculo-squelettique à transmettre cette force avec un minimum de pertes mécaniques.
A partir de ce postula là, les muscles fléchisseurs des doigts, en particulier :
- les fléchisseurs profonds profonds des doigts (Flexor Digitorum Profundus (FDP)),
- les fléchisseurs superficiels des doigts (Flexor Digitorum Superficialis (FDS)).
présentent une capacité de production de force dépendante de leur longueur musculaire, ainsi :
- lorsque le poignet est en flexion, il subsiste un raccourcissement de ces muscles, engendrant une diminution de la force,
- lorsque le poignet est en extension, il subsiste un allongement optimal de ces muscles, engendrant alors une capacité à générer une production de force maximale.
Certaines études biomécaniques rapportent une diminution de la force de préhension pouvant atteindre 25 à 60 % lorsque le poignet est placé en flexion ou dans une position non optimale. [7] [15] [16]
interaction entre fléchisseurs des doigts et stabilisation du poignet
Un autre élément fondamental réside dans l’interaction fonctionnelle entre les muscles de la main et du poignet. En effet, les fléchisseurs des doigts participent également à la flexion du poignet, ce qui induit un phénomène de couplage mécanique qui repose sur le fait qu’en l’absence de stabilisation, les fléchisseurs tendent à entraîner le poignet en flexion.
Les extenseurs du poignet jouent alors un rôle clé en stabilisant le poignet en extension, permettant aux fléchisseurs d’exprimer leur potentiel maximal.
Les données expérimentales montrent que la relation entre angle du poignet et force de préhension suit une courbe en U inversé :
- faible en flexion,
- maximale en extension modérée,
- décroissante en extension extrême.
Le pic de production de force se situe généralement entre 0° et 50° d’extension, avec une médiane autour de 15–20°. [17] [18]
Malgré la robustesse de ces résultats, leur transposition directe à la traction en street lifting doit être nuancée. En effet, la majorité des études sur la force de préhension sont réalisées :
- en conditions isométriques,
- sans mouvement global,
- sans intégration de la chaîne cinétique.
Or, la traction en street lifting constitue un mouvement :
- dynamique,
- multi-articulaire,
- coordonné.
Dans lequel la main n’est pas un organe de production de force principal, mais un interface de transmission entre le corps et la barre.
Ainsi, une configuration biomécaniquement sous-optimale en condition isométrique peut devenir optimale dans un système dynamique multi-articulaire, en raison de son impact sur la coordination inter-segmentaire et la transmission de force.
le false grip lors de la traction en street lifting
L’utilisation du « false grip », caractérisée par une flexion partielle du poignet associée à un positionnement plus proximal de la barre dans la paume de la main, constitue une stratégie technique fréquemment observée chez les athlètes de haut niveau, tant en traction pronation (pull-up) qu’en traction supination (chin-up).
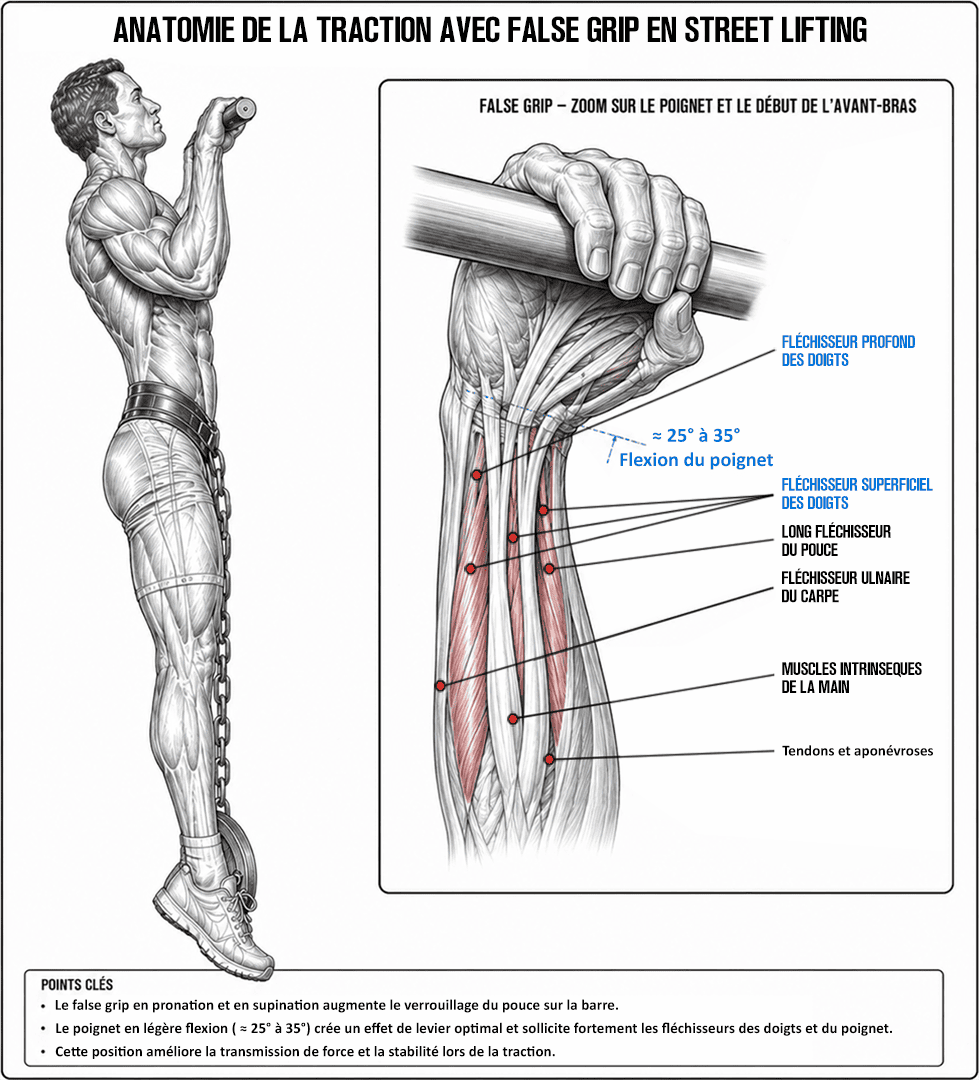
Loin d’être une simple variante de prise, ce positionnement semble répondre à des contraintes biomécaniques précises, en particulier dans un contexte de charges élevées ou de recherche d’optimisation de la performance. En effet, bien que cette configuration puisse apparaître, à première vue, défavorable au regard des modèles classiques de production de force de préhension, elle s’inscrit en réalité dans une logique d’optimisation de la transmission de force au sein de la chaîne cinétique.
Le « false grip » ne vise pas à renforcer la prise, mais à transformer sa fonction au service du mouvement.
false grip et réduction du bras de levier externe
L’un des mécanismes biomécaniques majeurs induits par le « false grip » réside dans la modification du bras de levier externe exercé par la barre sur les structures digitales.
Dans une prise classique, où la barre est principalement maintenue par les doigts, la distance entre le point d’application de la force (barre) et l’axe de rotation du poignet est relativement importante, ce qui génère un moment de force élevé au niveau des articulations des doigts, imposant une sollicitation accrue des muscles fléchisseurs des doigts (notamment le fléchisseur profond des doigts et le fléchisseur superficiel des doigts).
À l’inverse, l’adoption d’un « false grip » permet :
- de rapprocher la barre de l’axe du poignet,
- de transférer une partie du contact vers la paume de la main,
- et, par conséquent, de réduire significativement le bras de levier externe appliqué aux doigts.
D’un point de vue mécanique, cette réduction du bras de levier se traduit directement par une diminution du moment de force à compenser par les fléchisseurs des doigts, ce qui entraîne :
- une réduction de la contrainte musculaire locale,
- une diminution de la fatigue du grip,
- une meilleure tolérance à des charges élevées ou à des volumes importants.
En réduisant le bras de levier de la barre, le « false grip » diminue la dette mécanique imposée aux doigts.
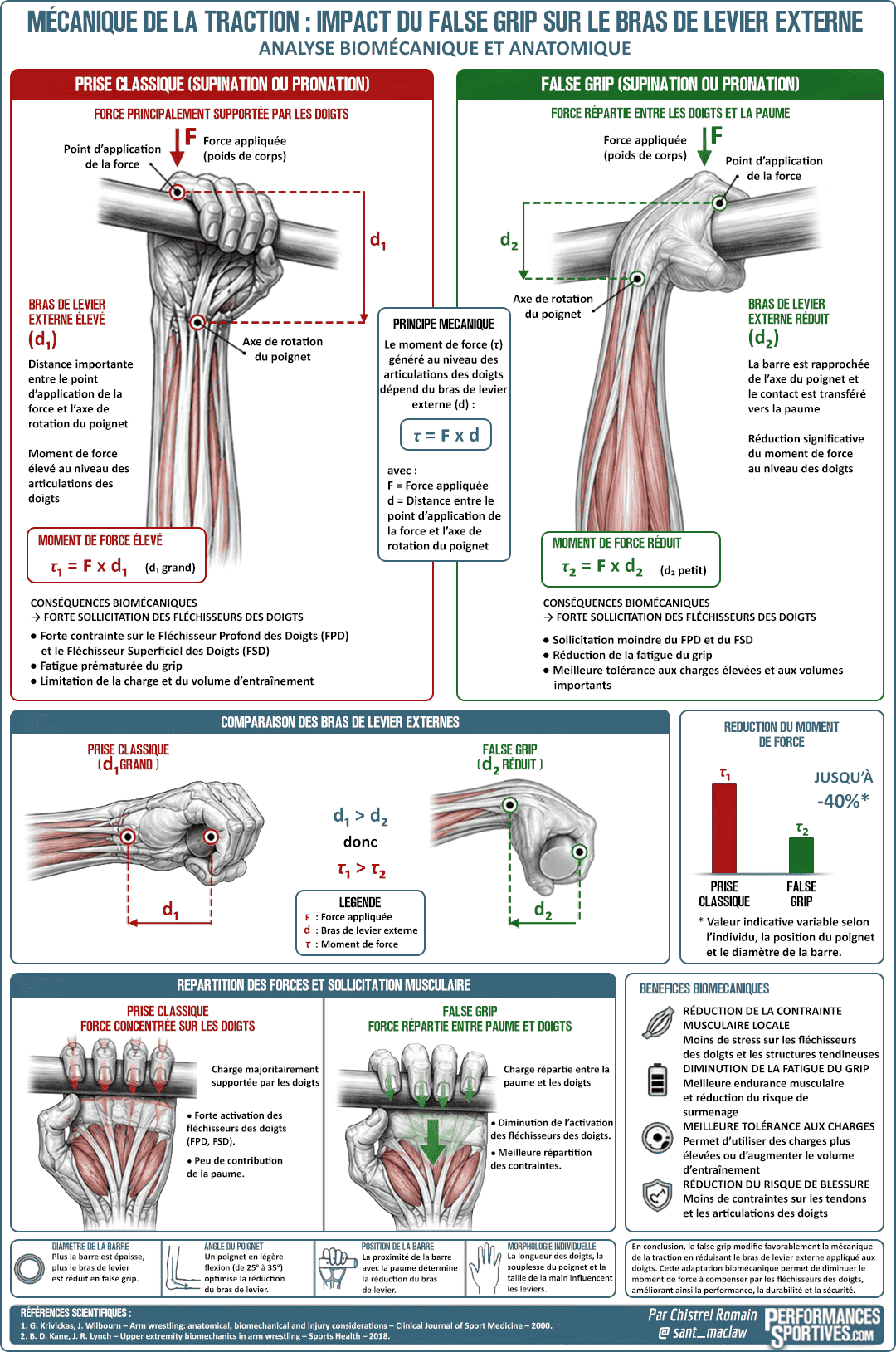
Au-delà de la simple réduction des contraintes mécaniques, le « false grip » induit une transformation qualitative du mode de préhension.
Dans une configuration classique, la tenue de la barre repose majoritairement sur une compression active des doigts, impliquant une activation importante et continue des fléchisseurs des doigts, caractérisant un grip actif, énergivore et localement limitant.
En revanche, dans une configuration en « false grip » :
- la barre vient s’appuyer davantage sur la paume,
- la contribution des doigts à la production de force diminue,
- la préhension devient en partie structurelle plutôt que contractile.
Cette transition correspond à un passage :
- d’un grip actif (basé sur la contraction musculaire)
- à un support passif (basé sur l’organisation mécanique des structures de la main).
Ce changement de paradigme présente plusieurs avantages biomécaniques majeurs :
- une réduction de la dépendance au système musculaire digital,
- une diminution du coût énergétique local,
- une augmentation de la durabilité de la prise dans le temps,
- une libération relative des ressources neuromusculaires au profit des segments proximaux (coude, épaule).
Ce type de stratégie est également observé dans d’autres disciplines telles que la gymnastique aux anneaux ou le muscle-up, où le « false grip » est utilisé pour stabiliser l’interface main–support tout en facilitant la transition du mouvement.
implications du false grip pour la performance lors de la traction en street lifting
L’ensemble de ces adaptations mécaniques confère au « false grip » un intérêt particulier dans le cadre de la traction en street lifting. En réduisant les contraintes locales au niveau des doigts et en transformant la nature du grip, cette stratégie permet :
- de retarder l’apparition de la fatigue périphérique,
- de maintenir une qualité de tirage élevée sous charge,
- de favoriser une transmission plus efficiente de la force vers les segments moteurs principaux.
Ainsi, le « false grip » ne doit pas être interprété comme une position sous-optimale, mais comme une adaptation spécifique aux exigences du mouvement, illustrant parfaitement la distinction entre :
- production de force locale,
- efficacité mécanique globale.
Bien que la flexion du poignet réduise la force de préhension maximale en conditions isolées, elle pourrait émerger naturellement lors des mouvements de traction en raison de l’activation conjointe des fléchisseurs des doigts et du poignet. Cette configuration pourrait favoriser la transmission de force dans la chaîne cinétique plutôt que la production de force locale.
comparatif du modele du bras de fer avec la traction en street lifting
Le bras de fer constitue un modèle biomécanique particulièrement pertinent pour analyser le rôle du poignet dans un contexte de production et de transmission de force maximale. Contrairement aux approches expérimentales classiques, souvent limitées à des conditions isométriques et analytiques, cette discipline met en jeu un système dynamique, interactif et hautement contraint, dans lequel la performance dépend directement de la capacité à contrôler une interface externe tout en transmettant efficacement la force produite par les segments proximaux.
Dans ce cadre, les travaux de G. Krivickas et J. Wilbourn, ainsi que ceux de B. D. Kane et J. R. Lynch, apportent des éléments particulièrement éclairants quant au rôle déterminant de la flexion du poignet dans la performance. [19]
Les analyses biomécaniques du bras de fer montrent que la flexion du poignet constitue une composante essentielle du geste, notamment dans les phases décisives du mouvement. Cette action, souvent décrite dans la pratique sous le terme de « cupping », permet à l’athlète de :
- fermer la chaîne main–avant-bras,
- augmenter la tension dans les fléchisseurs des doigts et du poignet,
- imposer un désavantage mécanique à l’adversaire.
D’un point de vue fonctionnel, la flexion du poignet ne se limite pas à une simple production de force locale, mais participe activement à la structuration mécanique de l’interface de contact entre les deux athlètes. Elle permet ainsi de transformer la main en un levier efficace, capable de transmettre et d’orienter la force produite par l’ensemble du membre supérieur.
En bras de fer, la flexion du poignet ne sert pas à serrer plus fort, mais à structurer la transmission de force.
L’un des apports majeurs du modèle du bras de fer réside dans la compréhension du rôle du poignet comme organe de contrôle de l’interface mécanique.
Les études montrent que la flexion du poignet permet :
- d’augmenter la stabilité de la prise,
- de verrouiller la position de la main,
- de rediriger les forces vers les segments les plus puissants, notamment le coude et l’épaule.
Cette configuration favorise une transmission de force continue et cohérente, limitant les pertes d’énergie au niveau des structures distales. Autrement dit, le poignet agit comme un point de jonction stratégique, assurant la continuité mécanique entre la main et le reste de la chaîne cinétique.
Dans ce contexte, la performance ne dépend plus uniquement de la capacité à produire de la force au niveau des doigts, mais de la capacité à :
- organiser cette force,
- la canaliser,
- la transmettre efficacement.
Les données issues du bras de fer mettent en évidence un paradoxe fondamental en biomécanique :
une position du poignet considérée comme sous-optimale pour la production de force de préhension en conditions isolées (flexion) peut devenir hautement performante dans un contexte dynamique.
En effet, comme démontré dans les études sur la force de grip, la flexion du poignet réduit la capacité des fléchisseurs des doigts à produire de la force maximale en raison de la relation longueur–tension. Cependant, dans le cadre du bras de fer, cette perte de force locale est compensée, voire surpassée, par un gain en efficacité mécanique globale, notamment en termes de transmission de force et de contrôle de l’interface.
Ce phénomène illustre une distinction essentielle entre :
- performance analytique (force isolée),
- performance fonctionnelle (intégration dans un système dynamique).
Ainsi, une position faible en laboratoire peut devenir dominante en situation réelle.
compréhension et transposition du false grip pour la traction en street lifting
L’intérêt du modèle du bras de fer pour le street lifting réside dans sa capacité à éclairer des observations empiriques fréquemment rapportées par les athlètes, notamment l’efficacité du « false grip » en traction.
À l’instar de la flexion du poignet en bras de fer, le « false grip » en traction :
- réduit la dépendance à la force de préhension pure,
- favorise une organisation plus efficiente de la chaîne cinétique,
- améliore la transmission de force vers les segments moteurs principaux.
Ainsi, bien que cette configuration puisse apparaître défavorable au regard des modèles classiques du grip, elle pourrait constituer une adaptation biomécanique spécifique aux exigences du mouvement de traction, où l’objectif n’est pas de maximiser la force locale, mais d’optimiser son utilisation. [20]
Ce parallèle renforce l’idée selon laquelle la biomécanique du geste ne peut être comprise uniquement à travers des modèles analytiques, mais doit être envisagée dans une perspective systémique et fonctionnelle. [21]
Le « false grip » en traction et la flexion du poignet en bras de fer répondent à une même logique : privilégier la transmission de force sur sa production locale.
Les études sur le bras de fer apportent une validation indirecte mais particulièrement pertinente des mécanismes observés en traction. Elles démontrent que la position du poignet influence profondément la performance, non pas uniquement par son impact sur la force de préhension, mais surtout par son rôle dans la coordination, la transmission et l’orientation de la force. [22] [23]
Ainsi, le poignet doit être envisagé comme un régulateur mécanique, capable d’adapter le fonctionnement de la chaîne cinétique aux contraintes spécifiques du mouvement.
En biomécanique du mouvement, la meilleure position n’est pas celle qui produit le plus de force, mais celle qui permet de l’exploiter pleinement.
les déviations du poignet lors de la traction en street lifting
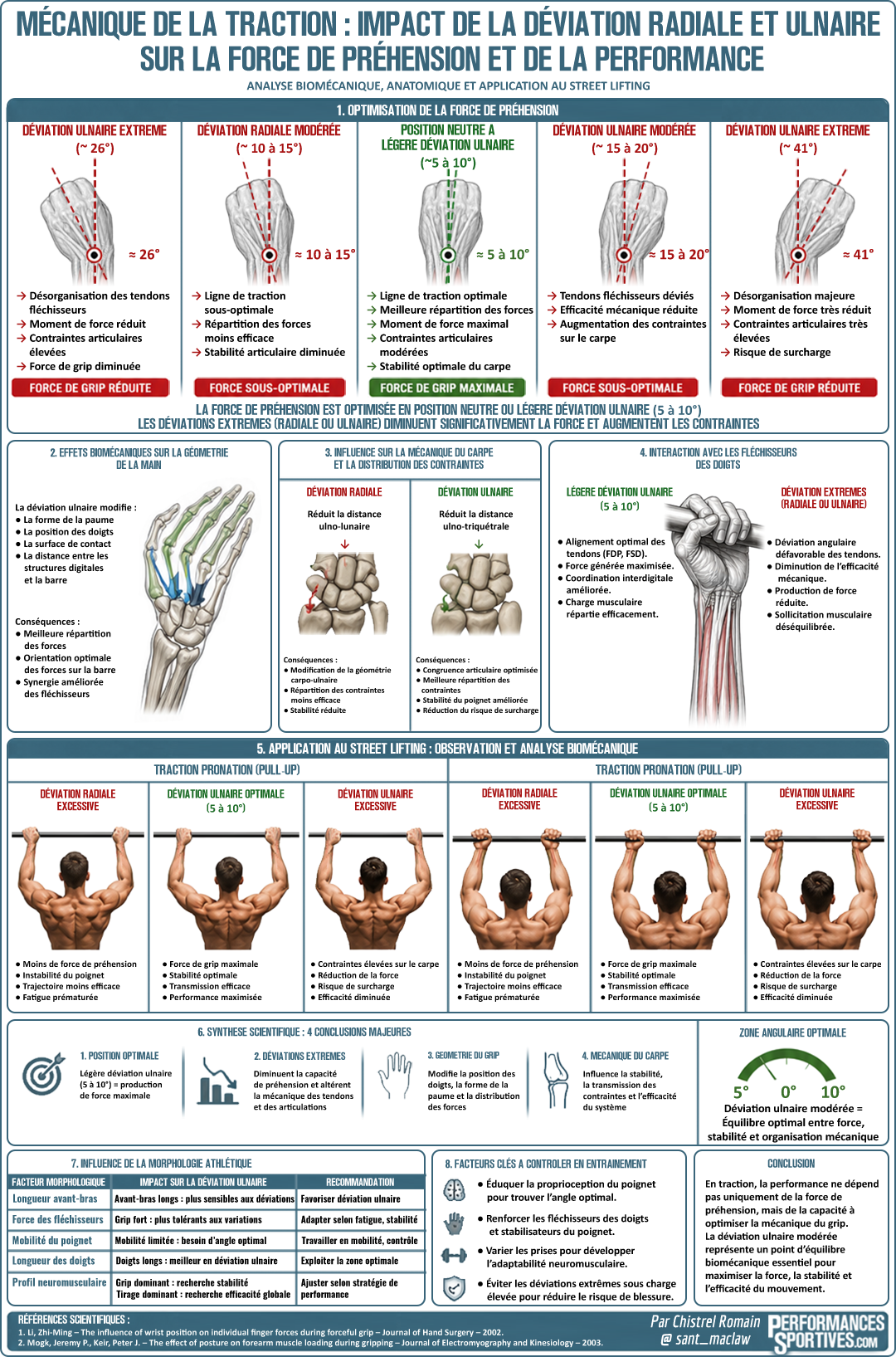
Au-delà de la flexion et de l’extension du poignet, la déviation ulnaire constitue un paramètre biomécanique fondamental dans l’organisation du grip. Les données issues de la littérature scientifique montrent de manière convergente que la production de force de préhension est optimisée lorsque le poignet adopte une légère déviation ulnaire, généralement comprise entre 5° et 10°, tandis que les déviations extrêmes, qu’elles soient radiales ou ulnaires, altèrent significativement la capacité de production de force.
Les travaux de Zhi-Ming Li ainsi que ceux de Mogk et Keir mettent en évidence que la position du poignet influence directement : [24]
- la distribution des forces entre les doigts,
- la sollicitation des muscles de l’avant-bras,
- la configuration mécanique globale de la main lors de la préhension.
La déviation ulnaire n’est pas un simple ajustement postural : elle conditionne l’architecture mécanique du grip.
Les études expérimentales comparant différentes positions de déviation du poignet (neutre, déviation ulnaire maximale, déviation radiale maximale) montrent que :
- la force de grip maximale est obtenue en position neutre ou légèrement ulnaire,
- les déviations extrêmes entraînent une diminution significative de la force.
Dans ces configurations extrêmes (≈ 41° en ulnaire, ≈ 26° en radiale), plusieurs phénomènes sont observés :
- une désorganisation de la ligne de traction des tendons fléchisseurs,
- une altération du moment de force des muscles digitaux,
- une augmentation des contraintes articulaires au niveau du carpe.
Ainsi, la légère déviation ulnaire apparaît comme une zone de compromis optimale, permettant à la fois :
- une production de force élevée,
- une organisation mécanique efficiente des structures impliquées.
La performance du grip ne dépend donc pas d’une position extrême, mais d’un équilibre angulaire finement ajusté.
L’un des apports majeurs des études biomécaniques réside dans la compréhension de l’impact de la déviation du poignet sur la géométrie interne du grip. Les travaux en ergonomie et en biomécanique montrent que la déviation ulnaire modifie :
- la forme de la paume,
- la position relative des doigts,
- la distance entre les structures digitales et la surface de contact.
Ces modifications ont des conséquences directes sur la production de force :
- elles permettent une meilleure répartition des charges entre les doigts,
- favorisent une orientation plus optimale des forces exercées sur la barre,
- améliorent la synergie entre les différents fléchisseurs des doigts.
En d’autres termes, la déviation ulnaire contribue à reconfigurer le système de préhension, en optimisant la manière dont les forces sont produites et transmises. Modifier l’angle du poignet, c’est redessiner la mécanique interne de la main.
Au niveau articulaire, la déviation du poignet entraîne des modifications significatives dans la géométrie et la cinématique du carpe.
Les études portant sur la biomécanique du carpe en situation de grip montrent que :
- la déviation radiale réduit la distance ulno-lunaire,
- tandis que la déviation ulnaire réduit la distance ulno-triquétrale.
Ces variations traduisent une redistribution des contraintes mécaniques au sein des articulations carpo-ulnaires, influençant :
- la stabilité du poignet,
- la transmission des charges,
- et potentiellement le risque de surcharge articulaire en cas de position extrême.
Ainsi, une déviation ulnaire modérée permettrait :
- d’optimiser la congruence articulaire,
- de répartir plus efficacement les contraintes,
- de stabiliser le poignet dans une configuration mécaniquement favorable.
La position du poignet, et en particulier sa déviation, influence directement la longueur fonctionnelle et la ligne d’action des tendons fléchisseurs des doigts.
Dans une position légèrement ulnaire :
- les fléchisseurs des doigts (FDP, FDS) se trouvent dans une configuration mécanique plus favorable,
- leur capacité à générer de la force est optimisée,
- la coordination interdigitale est améliorée.
À l’inverse, dans des positions extrêmes :
- les tendons peuvent subir des déviations angulaires défavorables,
- leur efficacité mécanique diminue,
- la production de force devient moins efficiente.
Les travaux de Mogk et Keir montrent également que la posture du poignet influence la charge musculaire des muscles de l’avant-bras, confirmant que la déviation ulnaire modérée permet une répartition plus efficiente des contraintes musculaires. [25]
Ainsi, une légère déviation ulnaire aligne les structures pour produire de la force et une déviation excessive les désorganise.
application de la déviation pour la performance lors de la traction en street lifting
Dans le contexte de la traction en street lifting, il est fréquemment observé que les athlètes adoptent spontanément une légère déviation ulnaire du poignet, que ce soit en pronation ou en supination.
Cette observation empirique trouve une cohérence directe avec les données scientifiques :
- elle permet d’optimiser la production de force de préhension,
- d’améliorer la stabilité du grip,
- de favoriser une transmission de force plus efficace vers les segments proximaux.
Cette adaptation peut ainsi être interprétée non comme une variation technique aléatoire, mais comme une réponse biomécanique optimisée aux contraintes du mouvement, résultant d’un ajustement fin entre :
- production de force,
- organisation mécanique,
- efficacité globale du geste.
L’ensemble des données issues de la littérature permet de dégager quatre conclusions majeures :
- La position optimale du grip inclut une légère déviation ulnaire (~5–10°), associée à une production de force maximale.
- Les déviations extrêmes diminuent la capacité de préhension, en altérant la mécanique des tendons et des articulations.
- La déviation du poignet modifie la géométrie interne du grip, influençant la position des doigts et la distribution des forces.
- La déviation influence la mécanique du carpe et la transmission des contraintes, impactant directement la stabilité et l’efficacité du système.
La déviation ulnaire optimale représente un point d’équilibre entre force, stabilité et organisation mécanique du grip.
le positionnement du pouce lors de la traction en street lifting
Le positionnement du pouce sur la barre constitue un paramètre technique souvent sous-estimé, mais dont l’impact sur la biomécanique de la traction apparaît particulièrement déterminant. Bien qu’aucune étude n’ait, à ce jour, analysé spécifiquement cette variable dans le cadre du street lifting, la littérature scientifique relative à la force de préhension, aux patterns d’activation musculaire (EMG) et à la coordination motrice permet d’en proposer une interprétation robuste.
Les observations empiriques issues du terrain convergent vers un constat récurrent, à savoir que lors de la traction en street lifting, de nombreux athlètes rapportent que :
- un pouce en-dessous (enroulé) autour de la barre procure une sensation de stabilité accrue, mais également de “blocage” du mouvement,
- un pouce positionné au-dessus de la barre est associé à une sensation de tirage plus fluide, facilitant notamment le passage du menton au-dessus de la barre.
Ce ressenti, loin d’être anecdotique, trouve une cohérence directe dans les principes biomécaniques du contrôle moteur et de la rigidité articulaire.
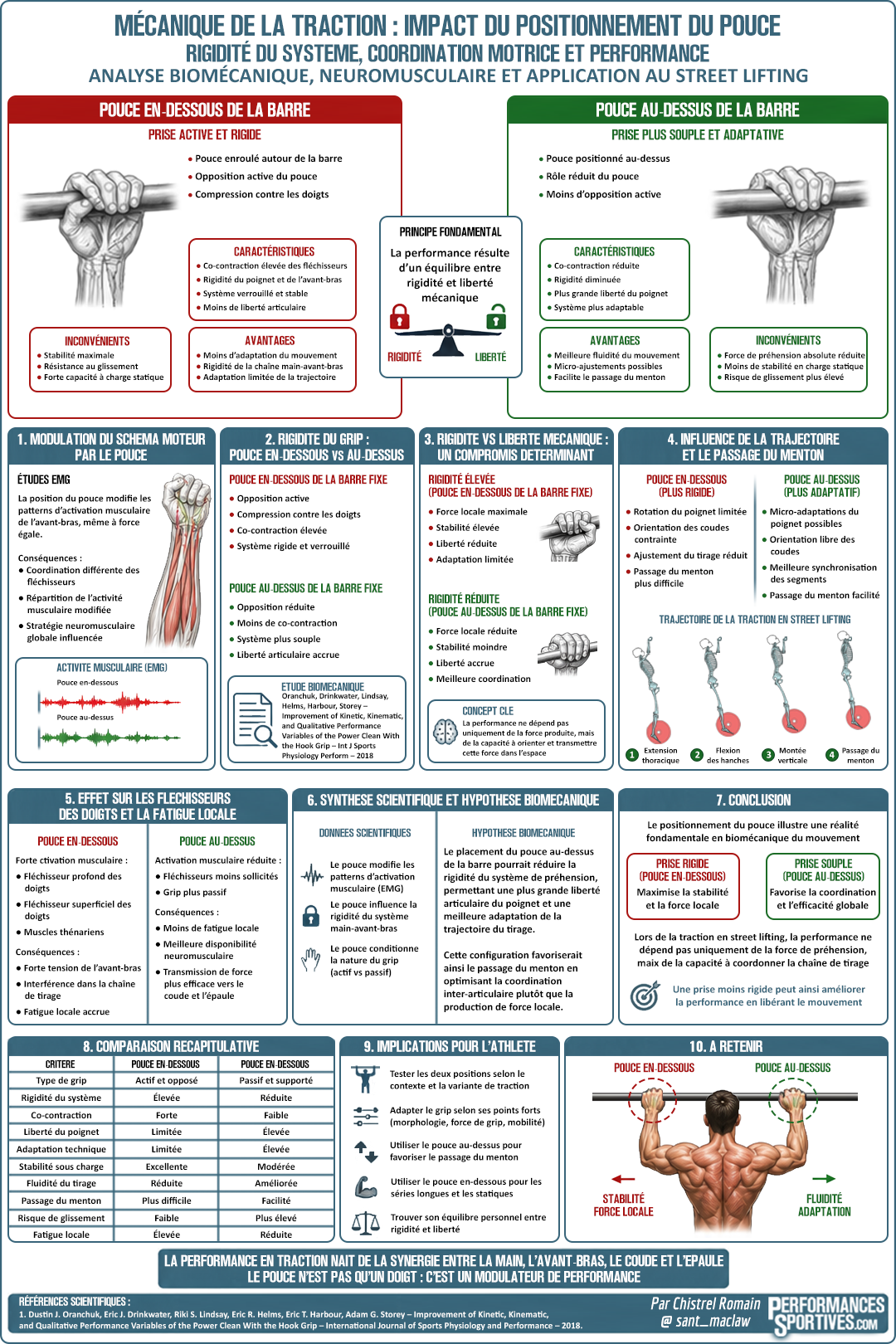
Les études électromyographiques portant sur la préhension montrent que la position du pouce influence significativement les patterns d’activation musculaire des muscles de l’avant-bras, et ce même lorsque la force produite est équivalente.
Ces travaux mettent en évidence que :
- le pouce joue un rôle central dans la coordination des fléchisseurs des doigts,
- le pouce modifie la répartition de l’activité musculaire entre les compartiments fléchisseurs et extenseurs,
- le pouce influence la stratégie neuromusculaire globale adoptée par le système moteur.
Ainsi, une simple modification du positionnement du pouce entraîne une réorganisation du schéma moteur, affectant non seulement la main, mais également l’ensemble de la chaîne cinétique distale.
Les travaux en biomécanique de la préhension distinguent classiquement deux grandes formes de grip : [27]
- le « power grip », caractérisé par une opposition active du pouce aux doigts,
- le « support grip » (ou « hook grip » / « thumbless grip »), dans lequel le pouce joue un rôle réduit voire passif.
Dans une configuration avec pouce en-dessous (enroulé) :
- le pouce exerce une compression active contre les doigts,
- ce qui augmente la co-contraction des fléchisseurs,
- et génère un système hautement rigide et verrouillé.
Cette rigidité présente des avantages :
- une stabilité maximale de la prise,
- une résistance accrue au glissement,
- une capacité élevée à maintenir une charge statique.
Cependant, elle s’accompagne également d’inconvénients majeurs dans un contexte dynamique :
- une réduction de la liberté articulaire du poignet,
- une diminution de la capacité d’adaptation du mouvement,
- une rigidification de la chaîne main–avant-bras.
À l’inverse, une prise avec le pouce au-dessus :
- réduit la co-contraction musculaire,
- diminue la rigidité du système,
- favorise une plus grande souplesse fonctionnelle.
Le positionnement du pouce met en évidence un principe fondamental en biomécanique, à savoir que la performance résulte d’un équilibre entre rigidité et liberté mécanique.
Ainsi :
- Une rigidité élevée (pouce enroulé) favorise la stabilité et la production de force locale, mais limite la capacité du système à s’adapter aux contraintes dynamiques.
- Une rigidité réduite (pouce au-dessus) diminue la force de préhension maximale, mais améliore la coordination inter-articulaire et la fluidité du mouvement.
Ce compromis est particulièrement critique dans un mouvement comme la traction en street lifting, où la performance ne dépend pas uniquement de la force produite, mais de la capacité à orienter et transmettre cette force dans l’espace.
Trop de rigidité bloque le mouvement, trop de souplesse disperse la force : la performance naît de leur équilibre.
La traction en street lifting ne constituant pas un mouvement strictement vertical. Elle s’inscrit dans une dynamique multi-planaire, combinant :
- une production de force majoritairement dans le plan sagittal,
- une stabilisation scapulaire entre les plans frontal et transversal,
- une trajectoire du centre de masse orientée selon une direction oblique postéro-supérieure.
Cette trajectoire implique :
- une extension thoracique initiale,
- suivie d’une flexion des hanches,
- puis d’un rapprochement du centre de masse vers la barre en phase terminale.
Dans ce contexte, un grip trop rigide (pouce enroulé) peut :
- limiter la rotation du poignet,
- contraindre l’orientation des coudes,
- réduire la capacité d’ajustement du tirage.
À l’inverse, un grip plus “ouvert” (pouce au-dessus) permet :
- une micro-adaptation du poignet en cours de mouvement,
- une orientation plus libre des coudes,
- une meilleure synchronisation entre les segments.
Ces adaptations facilitent mécaniquement :
- l’engagement du buste en arrière,
- l’optimisation de la trajectoire,
- le passage du menton au-dessus de la barre.
La position du pouce influence également de manière significative l’activité des fléchisseurs des doigts :
avec un pouce enroulé, on observe une forte activation du fléchisseur profond des doigts, du fléchisseur superficiel des doigts et des muscles thénariens, ce qui augmente la tension dans l’avant-bras et peut créer une interférence dans la chaîne de tirage.
À l’inverse, en prise avec le pouce au-dessus :
- l’activation des fléchisseurs est réduite,
- le grip devient plus passif,
- la fatigue locale diminue.
Cette réduction de la contrainte distale permet :
- une meilleure disponibilité neuromusculaire,
- une transmission de force plus efficace vers le coude et l’épaule,
- une diminution du facteur limitant lié au grip.
Bien qu’aucune étude n’ait directement analysé l’impact du positionnement du pouce lors de la traction en street lifting, la littérature sur la préhension permet d’établir plusieurs conclusions solides :
- le pouce modifie les patterns d’activation musculaire (EMG),
- le pouce influence la rigidité du système main–avant-bras,
- le pouce conditionne la nature du grip (actif vs passif).
Ces éléments permettent de formuler l’hypothèse biomécanique suivante :
- Le placement du pouce au-dessus de la barre pourrait réduire la rigidité du système de préhension, permettant une plus grande liberté articulaire du poignet et une meilleure adaptation de la trajectoire du tirage. Cette configuration favoriserait ainsi le passage du menton en optimisant la coordination inter-articulaire plutôt que la production de force locale.
Le positionnement du pouce illustre parfaitement une réalité fondamentale en biomécanique du mouvement :
- une prise plus rigide maximise la stabilité et la force locale,
- une prise plus souple favorise la coordination et l’efficacité globale.
Dans le cadre spécifique de la traction en street lifting, où la performance dépend de la capacité à organiser un mouvement complexe dans l’espace, une diminution de la rigidité du grip pourrait constituer un avantage déterminant.
Ainsi, lors de la traction en street lifting, la performance ne dépend pas uniquement de la force de préhension, mais de la capacité à coordonner la chaîne de tirage. Une prise moins rigide peut ainsi améliorer la performance en libérant le mouvement.
anato-morphologie et adaptations lors de la traction en street lifting
L’analyse biomécanique du grip en traction ne peut être dissociée des caractéristiques morphologiques propres à chaque athlète. En effet, si les modèles scientifiques permettent d’identifier des tendances générales, notamment en matière de position optimale du poignet ou de production de force de préhension, leur application pratique révèle une variabilité interindividuelle significative.
Cette variabilité s’explique par l’interaction complexe entre :
- la morphologie de la main,
- la structure des segments osseux (avant-bras, bras),
- les propriétés mécaniques des tissus,
- le profil neuromusculaire de l’athlète.
Ainsi, une configuration biomécanique optimale pour un individu donné peut s’avérer sous-optimale pour un autre, illustrant la nécessité d’une approche individualisée. Il faut bien prendre en considération le fait, qu’il n’existe pas une prise optimale, mais des prises optimales en fonction de la structure de l’athlète.
Taille de la main et longueur des doigts :
La morphologie de la main constitue un facteur déterminant dans la capacité à générer et maintenir un grip efficace. Les athlètes présentant des mains longues et des doigts allongés disposent d’un avantage mécanique évident pour les prises en pouce enroulé. Cette configuration permet :
- une fermeture complète et sécurisée de la main autour de la barre,
- une augmentation de la surface de contact,
- une meilleure capacité de compression digitale.
À l’inverse, les athlètes ayant des mains plus courtes ou des doigts plus courts rencontrent davantage de difficultés à :
- maintenir une fermeture efficace,
- stabiliser la barre en grip fermé,
- produire une force de compression suffisante.
Dans ce contexte, une prise avec pouce au-dessus de la barre peut représenter une alternative mécaniquement plus efficiente, en réduisant les contraintes liées à la fermeture de la main.
Au-delà de la géométrie, la capacité de production de force des muscles intrinsèques et extrinsèques des doigts joue un rôle central.
Les athlètes présentant une dominance des avant-bras (forte capacité de grip) :
- bénéficient d’un avantage en grip fermé,
- exploitent pleinement la compression digitale,
- tolèrent mieux les contraintes locales.
À l’inverse, les profils dits “tirage dominant” :
- reposent davantage sur les muscles proximaux (grand dorsal, biceps),
- présentent un grip plus limitant,
- bénéficient davantage de stratégies réduisant la dépendance au grip (« false grip », pouce libre).
Ainsi, plus le grip est fort, plus il peut être exploité ; plus il est limitant, plus il doit être contourné.
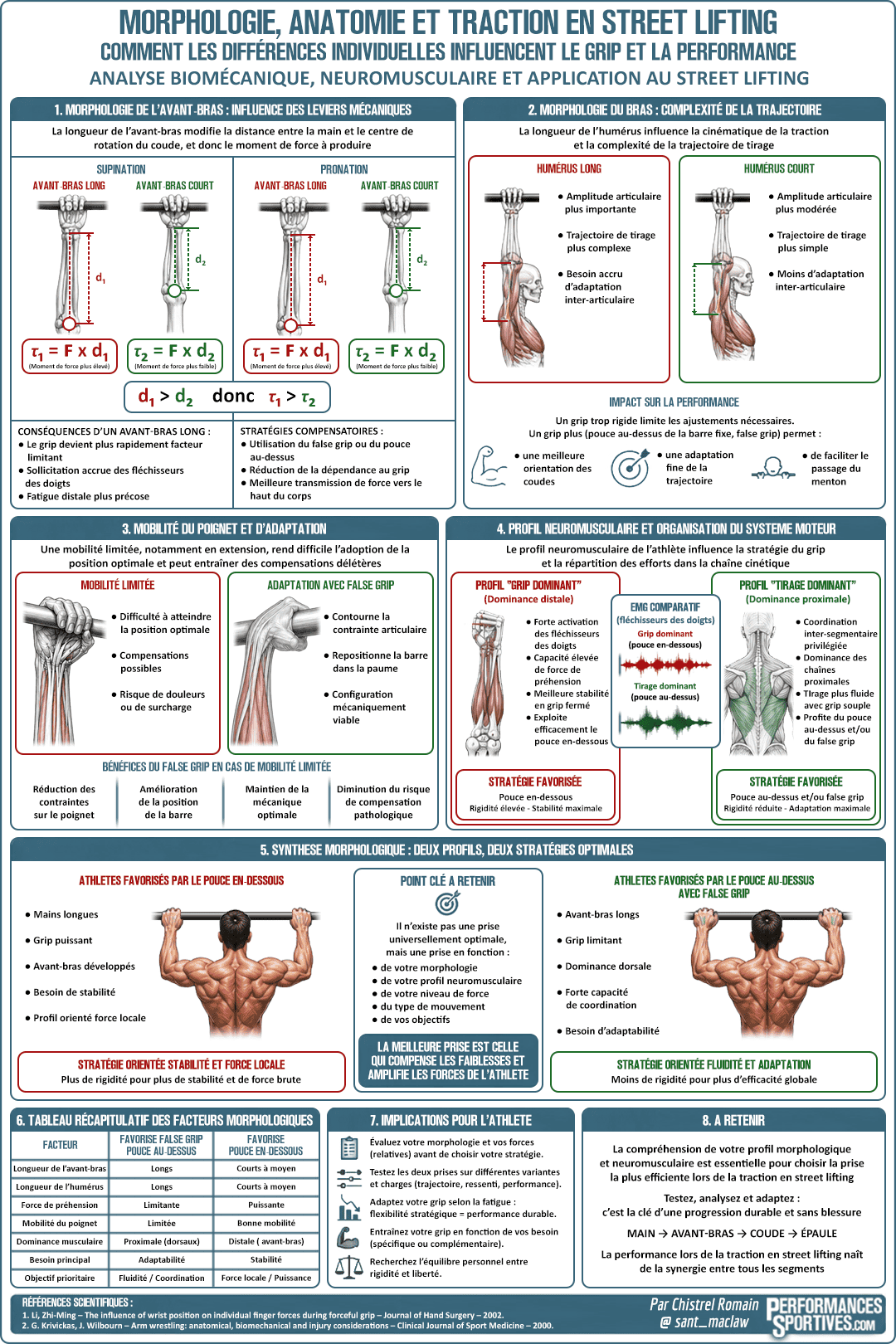
La longueur de l’avant-bras influence directement les contraintes mécaniques appliquées au système de préhension. Un avant-bras long augmente la distance entre la main et le centre de rotation du coude et donc le moment de force global à produire.
Dans cette configuration :
- le grip devient plus rapidement facteur limitant,
- les fléchisseurs des doigts sont soumis à des contraintes accrues,
- la fatigue distale apparaît plus précocement.
L’utilisation du « false grip » ou d’un pouce au-dessus permet alors :
- de réduire la dépendance au grip,
- d’optimiser la transmission de force,
- de compenser cet inconvénient morphologique.
La longueur de l’humérus influence également la cinématique du mouvement de traction, ainsi, un humérus long impose :
- une amplitude articulaire plus importante,
- une trajectoire de tirage plus complexe,
- une nécessité accrue d’adaptation inter-articulaire.
Dans ce contexte, une prise trop rigide peut limiter les ajustements nécessaires, tandis qu’un grip plus “souple” (pouce libre, « false grip ») favorise :
- une meilleure orientation des coudes,
- une adaptation fine de la trajectoire,
- une optimisation du passage du menton.
Mais également, la mobilité du poignet constitue un facteur souvent sous-estimé. Une mobilité limitée, notamment en extension rend difficile l’adoption de la position optimale décrite dans la littérature (extension + déviation ulnaire), et peut entraîner des compensations délétères.
Dans ce cas, le recours à un « false grip » permet :
- de contourner la contrainte articulaire,
- de repositionner la barre dans la paume,
- de maintenir une configuration mécaniquement viable.
Enfin, le profil neuromusculaire de l’athlète influence directement la stratégie de grip.
Les profils “grip dominant” :
- présentent une forte capacité de recrutement des fléchisseurs,
- bénéficient d’une meilleure stabilité en grip fermé,
- exploitent efficacement le pouce enroulé.
Les profils “tirage dominant” :
- privilégient la coordination inter-segmentaire,
- s’appuient davantage sur les chaînes proximales,
- tirent profit d’un grip moins rigide.
synthese anato-morphologique lors de la traction en street lifting
L’ensemble de ces éléments permet d’identifier deux profils d’athlètes distincts :
athlètes favorisés par le false grip avec pouce au-dessus
avant-bras longs,
grip limitant,
dominance dorsale,
forte capacité de coordination,
besoin d’adaptabilité.
athlètes favorisés par le pouce en-dessous
mains longues,
grip puissant,
avant-bras développés,
besoin de stabilité,
profil orienté force locale.
Bien évidemment, ce modèle n’est pas figé, le plus important à retenir est que la meilleure prise est celle qui compense les faiblesses et amplifie les forces de l’athlète.
Ainsi, les données scientifiques actuelles convergent vers une idée centrale, à savoir que la position optimale du grip ne peut être définie de manière absolue en traction lestée, car elle dépend de l’interaction entre contraintes biomécaniques et caractéristiques individuelles.
L’ensemble de ces observations confirment que la main, lors de la traction en street lifting, n’est pas un générateur de force principal, mais une interface de transmission, dont l’efficacité dépend de son intégration dans la chaîne cinétique.
- Performancessportives.com – La technique de la traction en street lifting – 2022.
- Jurgen Weineck – Biologie du sport – 1 mai 1996.
- Jurgen Weineck – Manuel d’entraînement – 18 avril 1996.
- Frédéric Delavier – Guide des exercices musculaires. approche anatomique. Arcadia – 2000.
- Frédéric Delavier – Guide des mouvements de musculation.
- Frédéric Delavier – Guide des tractions.
- [1] Shawn W. O’Driscoll, Dani Rotman, Masataka Minami, Jae-Man Kwak, Jorge L. Rojas Lievano, James S. Fitzsimmons – The effect of wrist flexion/extension on radiocapitellar joint kinematics during valgus extension of the elbow – Journal of Hand Surgery – 2025.
- [2] Shawn W. O’Driscoll, John A. Horii, Edmund Y. Ness, Frederick W. Cahalan, Kent R. Richards, Kai-Nan An – The relationship between wrist position, grasp size, and grip strength – Journal of Hand Surgery – 1992.
- [3] N. Mathiowetz, G. Rennells, V. Donahoe – Effect of elbow position on grip and key pinch strength – Journal of Hand Surgery – 1985.
- [4] D. W. Armstrong, R. J. Chaffin – The effect of wrist posture on grip strength and muscle activity – Journal of Biomechanics – 1979.
- [5] K. Watanabe, T. Imaeda, K. Suzuki – Influence of wrist position on grip strength and muscle activation – Journal of Hand Surgery – 2005.
- [6] J. L. Li – The effect of wrist angle on grip strength and forearm muscle activity – Ergonomics – 2006.
- [7] Gordon A. M., Huxley A. F., Julian F. J. – The variation in isometric tension with sarcomere length in vertebrate muscle fibres – The Journal of Physiology – 1966.
- [8] Gordon A. M., Homsher E., Regnier M. – Regulation of Contraction in Striated Muscle – Physiological Reviews – 2000.
- [9] Lieber R. L., Fridén J. – Functional and Clinical Significance of Skeletal Muscle Architecture – Muscle & Nerve – 2000.
- [10] Zajac F. E. – Muscle and Tendon: Properties, Models, Scaling, and Application to Biomechanics and Motor Control – Critical Reviews in Biomedical Engineering – 1989.
- [11] Shawn W. O’Driscoll, Jorge L. Rojas Lievano, et al. – The influence of wrist position on grip strength – The Journal of Bone and Joint Surgery – 1992.
- [12] Zhi-Ming Li – The influence of wrist position on individual finger forces during forceful grip – Journal of Hand Surgery – 2002.
- [13] Jeremy P. Mogk, Peter J. Keir – The effects of posture on forearm muscle loading during gripping – Journal of Electromyography and Kinesiology – 2003.
- [14] J. L. Li – The effect of wrist angle on grip strength and forearm muscle activity – Ergonomics – 2006.
- [15] A. V. Hill – The heat of shortening and the dynamic constants of muscle – Proceedings of the Royal Society B – 1938.
- [16] Lieber, Richard L. – Skeletal Muscle Structure, Function, and Plasticity – Lippincott Williams & Wilkins – 2002.
- [17] Brand, Paul W., Hollister, Anne M. – Clinical Mechanics of the Hand – Mosby – 1999.
- [18] Cooney, William P., Chao, Edmund Y.S. – Biomechanical analysis of static forces in the hand in various positions – Journal of Bone and Joint Surgery – 1977.
- [19] G. Krivickas, J. Wilbourn – Arm wrestling: anatomical, biomechanical and injury considerations – Clinical Journal of Sport Medicine – 2000.
- [20] B. D. Kane, J. R. Lynch – Upper extremity biomechanics in arm wrestling – Sports Health – 2018.
- [21] Stephen J. Lusk, Bruce D. Hale, Daniel M. Russell – Grip width and forearm orientation effects on muscle activity during the lat pull-down – Journal of Strength and Conditioning Research – 2010.
- [22] Joseph F. Signorile, Attila J. Zink, Steven P. Szwed – A comparative electromyographical investigation of muscle utilization patterns using various hand positions during the lat pull-down – Journal of Strength and Conditioning Research – 2002.
- [23] Laurent Vigouroux, Marine Devise, Théo Cartier, Clément Aubert, Eric Berton – Performing pull-ups with small climbing holds influences grip and biomechanical arm action – Journal of Sports Sciences – 2019.
- [24] Li, Zhi-Ming – The influence of wrist position on individual finger forces during forceful grip – Journal of Hand Surgery – 2002.
- [25] Mogk, Jeremy P., Keir, Peter J. – The effect of posture on forearm muscle loading during gripping – Journal of Electromyography and Kinesiology – 2003.
- [26] Dustin J. Oranchuk, Eric J. Drinkwater, Riki S. Lindsay, Eric R. Helms, Eric T. Harbour, Adam G. Storey – Improvement of Kinetic, Kinematic, and Qualitative Performance Variables of the Power Clean With the Hook Grip – International Journal of Sports Physiology and Performance – 2018.